6.マイコンボードの動作確認
次にマイコンボードHSWB-02にPCとの通信ケーブルRS-232C、マイコンボード用とサーボ用のニッカド電池(2ヶ)、サーボモータをそれぞれ繋ぎ合わせ動作確認。
なお、サーボモータには6.0V時のトルク6.4kg-cm、速度0.14sec/60°のMICRO-MGを14ケ使用。
|
 |
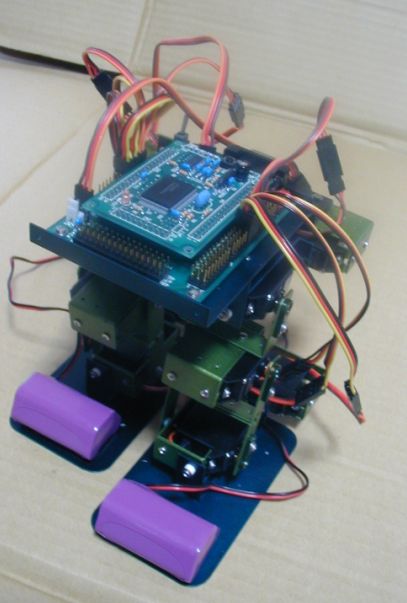 |
7.下半身組立て
二足歩行ロボットの大事な下半身だが、動きをよりスムーズにするため部分的にラジコンカー用POMブッシュと小型ベアリングを部分的に加え組み込んだ。
サーボモータからのリード線をうまくまとめられなかったのが悔やまれるかな。
|
8.上半身組立て
上半身は4ヶのサーボモータを組込むだけでわりと簡単。ザクヘッドは雑貨屋で売られていたセロハンテープカッターを、両腕はR/Cカーのドライブシャフトとガンダムのメタルハンドを使って作製した。
また、マイコンボードの熱がこもるのを避けるため、放熱できるよう胸部はフライスで開口した。
|
 |
 |
9.ハード完成
再度配線を確認した後、上半身と下半身を組み合わせハードは完成。
いろいろ改造したわりには、重心が規定の位置に運良くきていて助かった(笑)。
|

