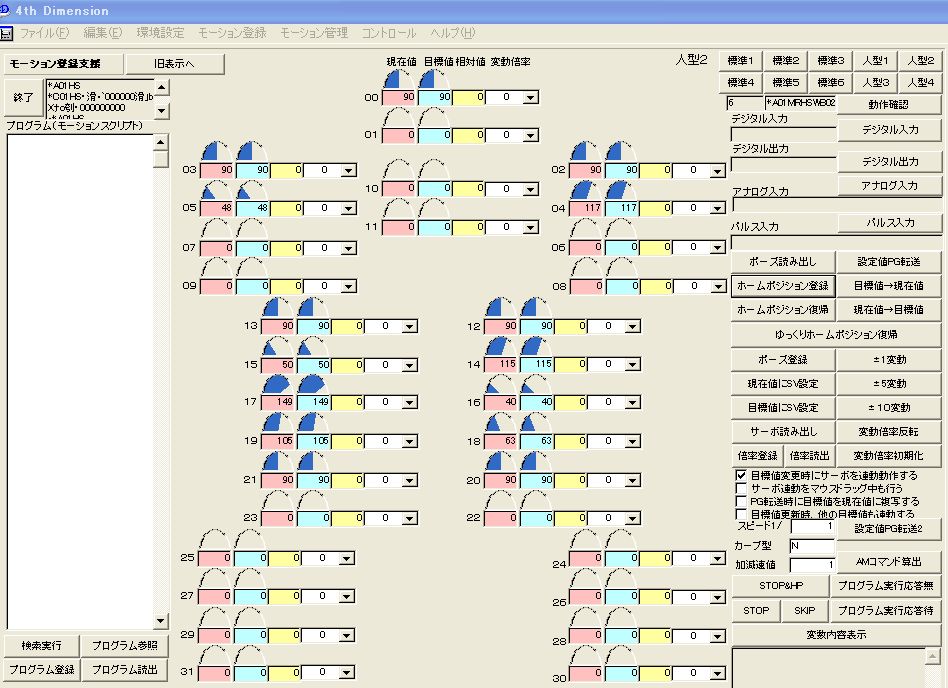
次にソフトウェアだが、以下がそのロボットの動きをシーケンス制御するソフト4D Runtimeのコントロールパネル。
中央のカラーカーソルにサーボモ-タの角度を入力してロボットの動きを制御する。