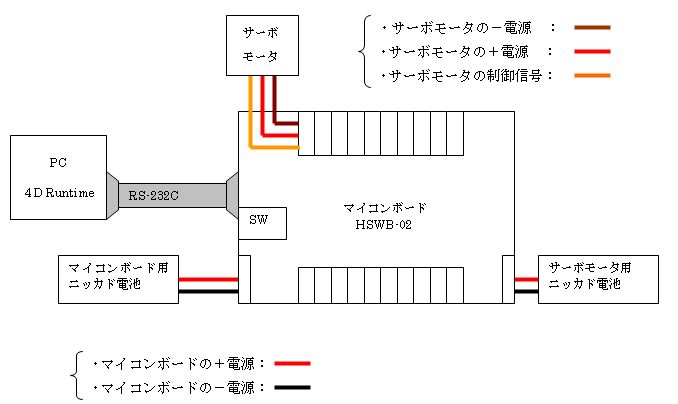
PC上の4D Runtimeで作成したシーケンスプログラムを通信ケーブルRC-232Cを用いて マイコンボードHSWB-02に送信し、そこで演算されて各関節のサーボモータを角度制御することでロボットが動きます。 上記配線図はサーボモータが1ヶしか明記してませんが、実際は14ヶのサ-ボモータを同時期に制御します。