
市販のラジコン用プロポで遠隔操作が可能な魚ロボットは、以下3つのパートで構成されています。
1.受信機/バッテリ/サーボなど収納する胴体ケース
2.尾柄、尾ひれを動かすリンク機構(推進力制御)
3.胸ひれを動かすリンク機構(揚力制御)
<1.受信機/バッテリ/サーボを収納する胴体ケース>
胴体ケースはプラスチックの中で最も軽いポリプロピレン(比重0.92)を用い、
摺動部はポリアセタール(比重1.4)、強度が必要なフレーム部はアルミ(比重2.7)を使っています。
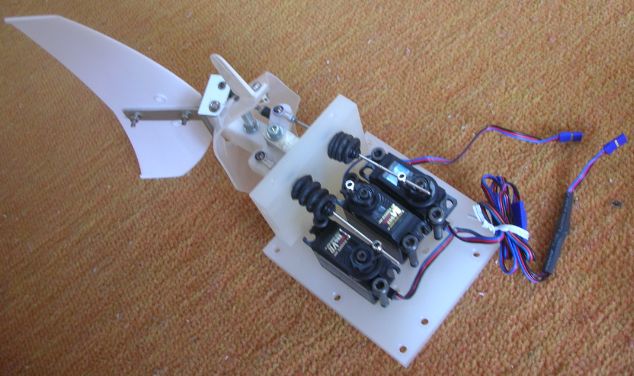
<2.尾柄、尾ひれを動かすリンク機構(推進力制御)>
推進力となる尾柄、尾ひれは2つのサーボで操作し、尾柄と尾ひれの位相差はサーボモータの回転速度差で再現しました。
(より正確な位相差を作るには、同速度のサーボを用いてマイコン制御するのが理想ですね)
<3.胸ひれを動かすリンク機構(揚力制御)>
揚力となる胸ひれは、航空機の翼と同様な構造で潜行/浮上を行います。
また、潜行/浮上時の負荷に耐えられるように、サーボは高トルクのものを用いました。
これらのパート分けした後、それぞれ詳細設計を行い、3次元モデルに組み上げたのが以下になります。
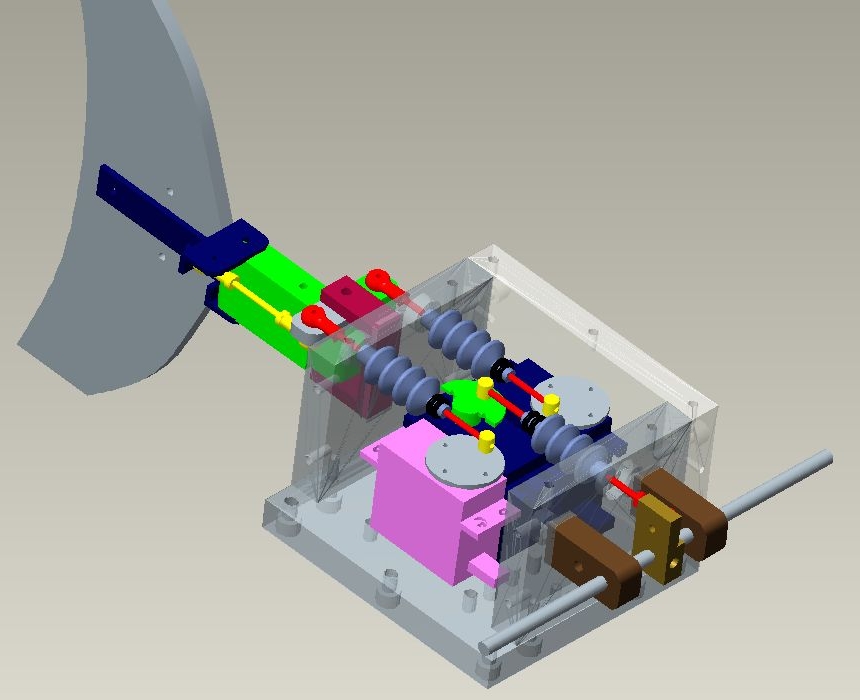 3次元モデル(フロント)
3次元モデル(フロント)
|
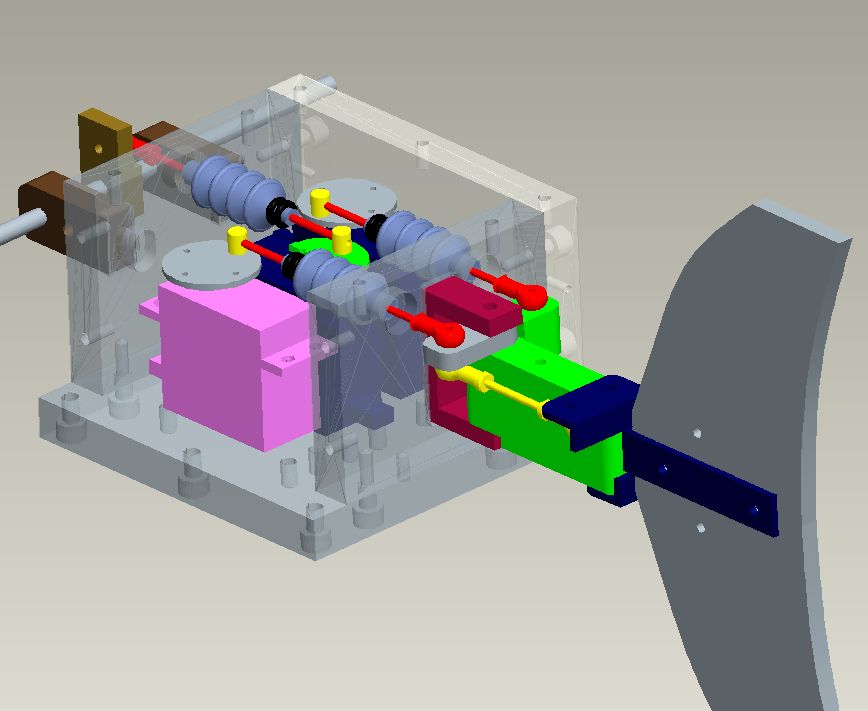 3次元モデル(バック)
3次元モデル(バック)
|
<強度解析>
推進力となるリンク機構部は製作前に、尾柄の軸となる部分/三角マーカ部を固定支持し、リンクして動く部分を矢印方向に静荷重15kgfを加えた強度解析を行い、
その時の変位量/最大主応力/フォンミーゼス応力を各々調べ、尾柄の材質がアルミもしくはポリアセタールのどちらが妥当か検討してみました。
強度解析結果より、材質アルミに静荷重15kgfを加えたとき、フォンミーゼス応力は35N・mm2となり、安全率は曲げ強さ÷ミーゼス応力で「87」となった。
これに対して材質ポリアセタールにした場合 安全率「2.5」と小さくなったが、仕様上問題ない値のため、尾柄の材質はポリアセタールに決めました。
|
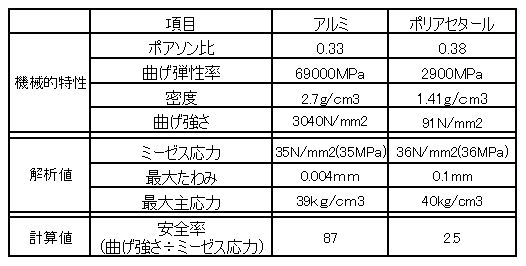 強度解析結果
強度解析結果
|
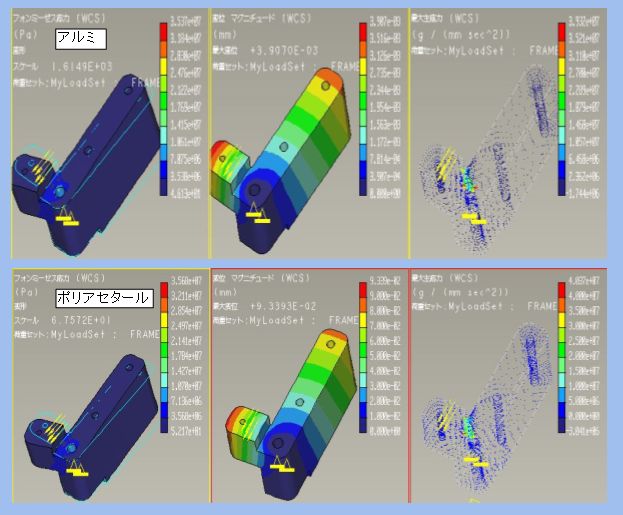 強度解析の詳細
強度解析の詳細
|
 加工品(フロント)
加工品(フロント)
|
 加工品(バック)
加工品(バック)
|
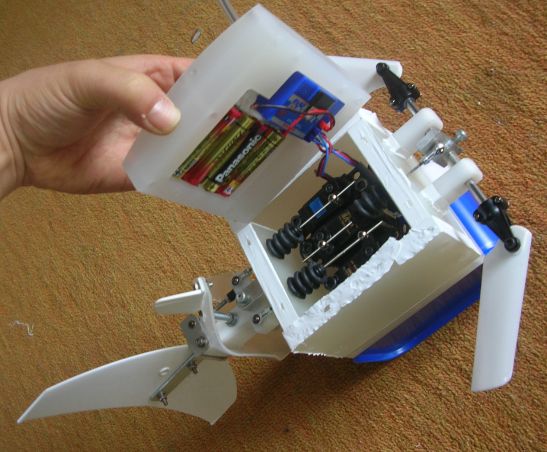 送信機及びバッテリー装着♪
送信機及びバッテリー装着♪
|
 完成♪
完成♪
|

|