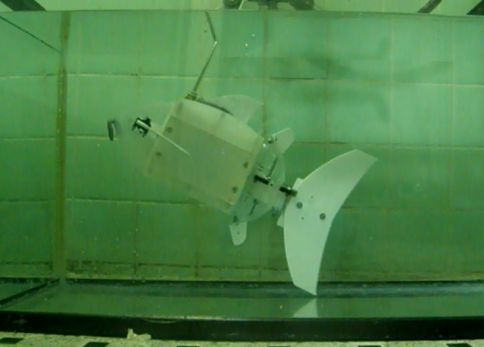
潜行するだけの加速力は出せなかったので、フロートを全て外して上から吊るし、疑似中性浮力状態で水中での動きを観察してみました。 (以下写真及び動画参照) 中性浮力を保ちながら推進するには、常にバランスが取れるジャイロセンサが必要ですね。
お魚ロボットを通して、機構学やシーリング、電気など勉強になりました。 また、ラジコン部品には、コンパクトで高性能ものが多々あるのにビックリ、ちょっと高価ですけども。 (1度撃沈してサーボモータが全て破損しました・・・) ロボット作りはやっぱり面白いですねぇ〜♪